Did not win, but was one of 6 non-prize winning finalists.
1. Technical Abstract:
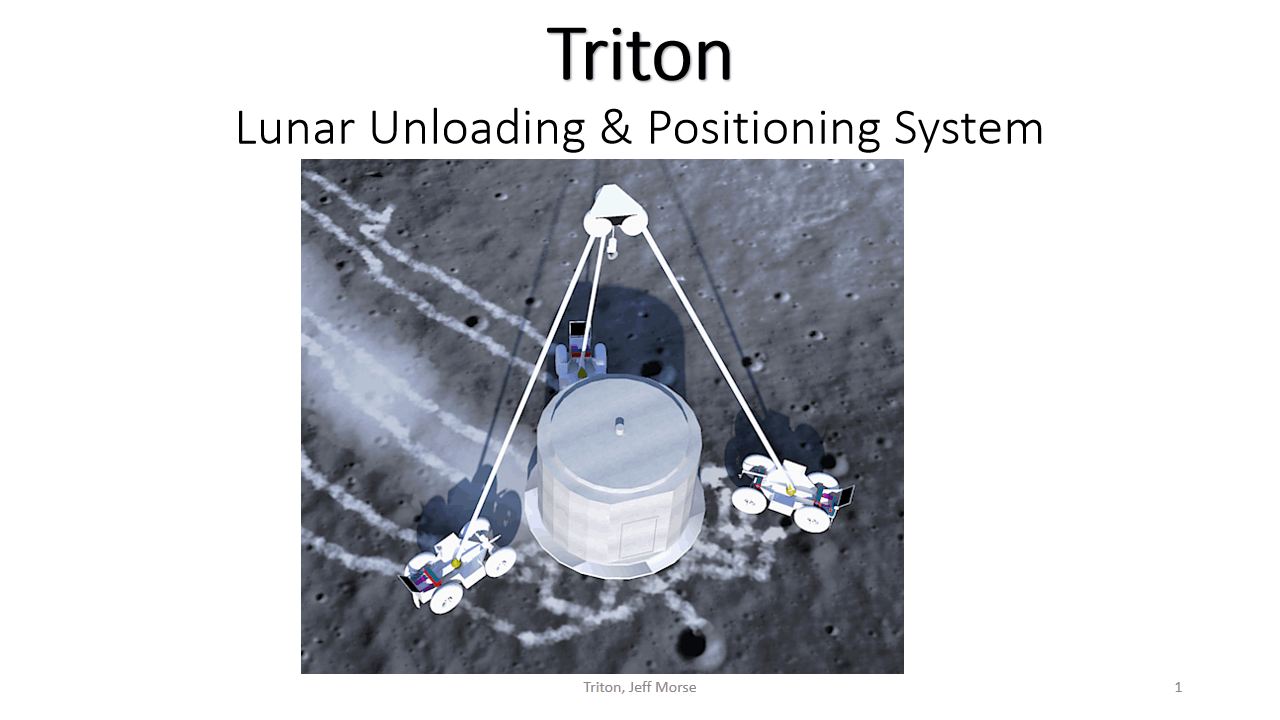
Triton is a mobile and operationally flexible 12,000 kg capacity reusable tripod crane modified for the Lunar Payload Delivery Challenge. It Unloads and Positions (up to 1 km away). It supports all lander types. It dramatically upsizes the tripod crane concept (the best lifting capacity per unit mass available). It adds to this a series of cables, which also offer great strength per unit mass, connected to electric winches to provide stiffness and operational flexibility. Three solar powered EV like "feet" allow the tripod vertical supports to be positioned for many modes of operation. After landing, Triton auto unloads the first payload, then auto unloads itself for surface operations. A payload "sled" towed by Tritons adds a very flexible positioning capability that can be both far from the lander but centimeter accurate. To adapt to unknown conditions, after the first payload, it is mainly remotely operated (supported by learning algos). It has human interfaces for HLS ops.
2. Technical Approach:
Triton is a large tripod (14 m long vertical supports) with remote controlled rovers as 3 moveable feet.
Total Mass: ~1250 kg, ~1500 kg with 20% safety factor
Power: No external power needed from lander.
Triton has a 1300 Wh Li battery capacity with and average of 1200 W of solar power generation. 220 V DC bus for powering winches and motors. 9 V DC bus for computing, sensors, cameras, relays, comms.
Key components
A. 3 movable rover "feet" (about 1.5m wide, 2.9m long and 1 m high)
Common to all feet
A1. Heavy duty frame with "Ballast Basket"
A2. Pre-charged Li battery pack and solar panel
A3. Control processor, router and 4g comms
A4. Lunar proven cameras and sensors
A5. 4 Spring Tires driven by independent electric motors. Front two are steerable.
A6. Vibrating retractable 2 m long, 50 cm wide knife pairs to penetrate lunar regolith to minimize sliding
A7. Common wiring bus connects all feet for power (DC 220V) and data redundancy (10-BaseT) to improve system redundancy
Add Specifically
Center foot: 1 3t Lift Winch, 1 3t Tow Winch, 1 1t Tensioning Winch, 2 Lander Tension Winches, small robotic arm and camera to work the tow hook and 2 lander leg attachments (when needed).
Both Side feet add a 1t Side Tensioning Winch, and a lander leg attacher
B. A 14 m vertical support attached at the center of each foot with a ball joint. A tensioning cable from STW allows "side" supports and center support to be pulled together.
C: 1 Tripod Top Assembly (TTA) (about 12m above the feet) with 3 ball joints attached to the top of the vertical support, lift cable from LW slide through main lift eye and drops from here, SW attached to TTA for control and improved stiffness.
D: A remote controlled lift hook with cameras and sensors is lowered on the lift cable to hook and unhook the payload (or other objects)
E. 6m wide circular Payload sled
Payload objects must have remote hooking eye on top that is part of the object or support for lifting that object. That lifting eye should be above the center of mass of the payload object.
F: Lander Payload Deck Items: Supports, Winch, Hold Downs, Wires
Triton as many repeatable long term operational modes:
Modes:
Unload Co-Delivered Payload After Landing (Auto)
Self-Unload Triton (Auto)
Position Payload Within 1 km of Lander. If there is a high potential of slippage or floundering: Tow Payload On Sled To Position, Lift Payload into Position and Recover Sled. Otherwise: Hook and Lift Payload and Drive Triton to Deployment Location, Lower Payload into Final Position
Park and Charge
Unload Payload Objects From Other Landers (Then Modes 3, 4, 5)
Move Objects from point A to B
Load Payload Onto Vehicle or Any Other Object
...
Inputs:
Moon to Earth Lander supported communications for the length of the the mission modes that are needed. A 4g type cellular radio would enable Triton to operate kms from the Lander. The Moon to Earth link will need to support high quality video to Earth (at least 1 Mbps) and control data back to the Moon. If the Lander can't support this than a comm component will need to be added to the payload platform with solar panel support.
Connect HW on Lander legs.
Strengths:
Multi-mode, highly flexible post initial unload functionality
Can lift the heaviest 12 t payload object in the challenge
Use of many technically mature components
Weaknesses:
More heavy and complex than alternatives for a simple unload
Will require a skilled Remote Operator (and video comms) for modes beyond 1 and 2
Risk: Tripod vertical supports breaks
Mitigations: Custom design combining metal and carbon composites should be testable. Some flex is OK.
Risk: Instabilities prove too difficult for Remote Operator. Balancing a high tripod with a high center of mass on an uneven surface is an usual operating mode
Mitigations: Practice operations on Earth with a scaled machinery, establish safe operational envelopes. Begin Lunar operations in a slow learning mode.
Risk: Excessive lunar soil slippage prevents needed tripod lift stability
Mitigations: Use of a "vibrating knife plate" pushes a 50 cm wide plate 1 m into the regolith before lift or tow, which is retracted after use.
Risk: Lunar Regolith component erosion, jamming and covering. This should not be an issue in Mode 1 and 2 operations but will matter in other modes. Most cables should not touch the surface, but some may, and the wheels of course will.
Mitigation: Wrapping the core of the feet in MLI to isolate from the wheels, a well as isolating the tow winch. Using a Teflon coated cable for tow and center foot to lander tensioner operations. Combine component movement with vibrations from "vibrating knife plate" to free regolith particles,
Risk: Excessive lunar soil slippage prevents needed tripod lift stability
Mitigations: Use of a "vibrating knife plate" pushes a 50 cm wide plate 1 m into the regolith before lift or tow, which is retracted after use. Use of local rocks to push off of. Use of other feet to optimize forces. Active use of wheel force to oppose slippage.
3. Concept of Operations:
Triton, with fully charged batteries, is attached to the lander payload platform with controllable latches, vertical supports for sled on supports above Triton feet
Additional stay-on-lander components are attached to payload deck
Payload is placed on sled and lifting hook is attached to payload
On Initial Lunar Landing:
Automation script runs Triton payload unloading process (payload is now just to side of lander on surface), payload hook unhooks
Automation script runs Triton self-unloading process
Remote operations (RO) uses all cameras and sensor to plan positioning operation
RO drives the 3 feet to their target tow mode positions
RO uses hook on center foot to hook sled (with payload on it)
RO drives Triton to a good tow location
RO has center foot tow cable move the up to payload 50m (repeat as needed)
RO puts Triton into lift mode, hooks payload, lifts payload 1m off sled
RO pulls out sled and lowers payload to final location.
RO unhooks payload, parks Triton away from payload
On New Lander Landings:
RO drives Triton to position sled at payload landing point
RO has Triton side feet attach to lander "back" legs
RO has center foot connect cable to both "front" legs
RO hooks a payload object
RO lifts payload and backs up center leg (while tension cable is reeled out)
When payload is on sled, lift hook is de-hooked by RO
RO performs On Initial Lunar Landing items 3-10 as needed for each payload item
RO repeats this On New Lander Landings as for each new lander.
4. Lunar Environment: Describe how the concept will work in the lunar environment with conditions such as vacuum, dust, solar, thermal, etc.
Lunar regolith is know to be very difficult to operate in, especially for heavy equipment with small footprints. It is uneven, with fine surface pulverizes and electrostatically sticky pulverized glass (dust) with embedded rock of unknown stability. This makes any sort of large crane on surface very challenging, especially one with moveable feet, which can easily flounder if moving while carrying a heavy load. As a tall tripod in motion surface unevenness must be constantly monitored to prevent tipping while in motion. While lifting "foot slide" is the key issue. Triton employs a number of feature to improve operations:
Maximum use of the mass and surface contact areas of the lander itself (except for small landers) to minimize foot slide
Cameras and sensors (including tilt) to plot best stop and lift points and paths with the best chance of success and adapt to conditions meter-by-meter
Wide feet with moveable surface contact plates to maximize surface area
Cable tensioners to minimize foot slide
Lunar optimized NASA developed wire tires
High torque 4 wheel drive
Via tensioning cables the ability to pull one foot out of a stuck position with the other feet
Minimization of foot movement while lifting
Maximization of towing payloads (on a sled) from a fixed position
Solar:
Although Triton is designed for operations in Lunar sunlight the battery pack should allow for limited short durations without sunlight. "Shallow" (less than 10m deep) long term Lunar perma-shadow operations can be accommodated by adding a solar panel under the tripod head and increasing battery size. "Deep" perma-shadow operations will need to be battery based and will probably be a one-time unload and positioning unless Triton can climb to "Shallow" perma-shadow before the batteries are depleted.
Dust: Foil wrap, vibrators, brushes
Thermal: Some MLI, small heaters. Long term perma-shadow ops will require active heating of the structure and more battery.
Radiation: Electronics redundancy, shielding
5. Case for Mass and Volume Optimization:
Triton is designed to lift 12,000 kg on the Moon (which requires a equivalent 2,000 kg lifting capacity on Earth) which is the challenge maximum. At times Triton will not be a in an optimal tripod configuration so that would reduce the lifting capacity per unit mass, but even if some shapes are only 1/3 as efficient they still will be double of the maximum lifting limit.
Due to the low Lunar gravity challenge is not the strength as much as it is the stiffness of the 3 verticals. A large load will try to bend the verticals in, which is limited and non-deforming will not be a significant issue. There are two ways to minimize this bending. One is the proper choice of material and shape of vertical. A custom designed carbon composite tube should provide better stiffness to mass that a metal tripod. Assuming a 12 m lifting height, our reference metal tripod would have a mass of ~ 410 kg. Use of specifically engineered carbon composite tube should reduce the mass by at least 50% and improve stiffness, resulting in a average mass of 167 kg. Additional stiffness results from tension cables (see diagrams) that not only control the lift point, but should minimize unwanted spread between the verticals.
The 12 m lifting height is needed to handle wide (up to 6m wide 2m high) or low density tall payload objects (up to 4m wide 6m high).
The entire Triton system is about 40 cubic meters (mostly the bottom 1 m of 6.5 m wide payload bay) ~ 1,250 kg in mass and can be used for any number of subsequent landings within 1 km of it's initial use. The refence design fits on top of a Blue Origin CLPS lander inside the Blue Origin's New Glenn rocket (and fairing as defined in its current user guide). It only impacts about 10% of the fairing volume.
6. Reliability:
For the primary unloading mission Triton has a medium-high level of reliability.
The use of tripod crane attached to a rigid payload deck and winches is a common Earth solution for similar functions. Li batteries to power them is novel, but battery power on Lunar surface missions is not. This mode of functionality can be tested and fine tuned on Earth using a payload mass of 1/6 the mass of the intended Lunar payload.
I would suggest Triton has a medium level of reliability for modes beyond the primary unloading function.
More Reliable Attributes:
The use of electric rovers on the Moon has been well established
All electric kids racing cars (German league) suggest a robust rover package of this volume and mass is possible.
Components widely used on Earth include:
Li Batteries
Electric winches
Cables
Solar panels
Remote control hooks (modes 3+)
Sled (modes 3+)
EV motors, power distribution
Common space proven components (best of breed should be used):
Space surface rated computer
Earth/Lunar comms
Rover robotics
Less Reliable Attributes apply to modes after initial payload unloading:
The 12 m Ti and Carbon Composite tube with ball joints at the ends is an novel and unusual structure. Long term used in Lunar thermal conditions is novel. It will need extensive modeling and ground testing.
The robotic arm for hooking and unhooking is new
Ball joints may become eroded or sticky in the Lunar environment
Lunar 4g/wifi, Vibrating Knife concept has not been tested in the Lunar environment
7. Autonomy:
Triton has many modes of operation.
The first two, unloading of the first payload (the most critical mode) Triton arrived with and unloading of Triton itself to the lunar surface, are autonomous. This is accomplished by a combination of computing, power and relays that sequence the activation of electrical winches (5 in this mode), firing of separation bolts (10-20) and release of the main lift hook. The program that drives these first two modes will be developed by building the operational Triton on earth on a stand in dummy lander and practicing operations with dummy payload objects with the exact volume and about 1/6 of the mass of the actual objects. After experimentation by human operators the best deployment outcome will be recorded to be played back on the Lunar surface at some time after landing. It is suggested that human operators supervise the process remotely and intervene if needed.
Due to the unknown conditions of the Lunar surface subsequent modes will require human judgement and application of learned operation techniques that would be best done by a pair of human operators. This could be called remote operations (RO). RO will be support by robust GUI centered around the 20 cameras and sensors available.
Many parts of the RO can be automated, streamlined with results fed into learning algorithms to create operational envelopes over time. This will start with scripts to control a given set of simultaneous actions inside a mode.
8. Capabilities:
Triton (as a 12m high, 14m wide system) can fully support unloading payload object of up to 12,000 kg from any lander currently proposed for CLPS and HLS except for SpaceX CLPS or HLS (that one needs to place payload objects on the surface, then it can be fully supported across all modes).
As a tripod concept, object volumes need to fit under the cone of support with some margin to move objects from a lift state to a set down state. Some maximums:
On the initial landing:
5m diam x 3m h (bottom) + 4m diam x 3m h (top) + many 1m x 1m objects any shape
For later landings:
6.5m diam x 3m h (bottom) + 4m diam x 3m h (top) + many 1m x 1m objects any shape
Triton can also position payload objects up to 1 km from the lander, as well as move payload objects as needed from point A to B, including loading them onto other objects. It can support hands on HLS operations.
The Triton reference design is optimized around Blue Origin CLPS as it provides the max fairing footprint and 14 m headroom needed to combine a 12,000 kg capacity system with a useful payload on it's initial landing and deployment. In the current depictions only Blue Origin CLPS can bring this system to the Lunar surface with it's full 12 m height. Triton can be scaled down to fit on smaller landers carried in smaller fairings. Volume and mass capacity will be lower. A 5 m diameter bed 3 m off the lunar surface could employ a 1/2 sized system.
Interfaces: hooks, eyes, large buttons HLS, USB 3.0, 4g, wifi, 9VDC, 220VDC, PNT
10. Please discuss the technical maturity of your proposed solution.
Materials made into custom shapes:
Titanium in Space, Maturity: High, TRL 9
Carbon Composites in Space, Maturity: High, TRL 9
Titanium & Carbon Composite joined for the Vertical Supports: Maturity: Low, TRL 3
"Feet" Components
Spring Tires: Moderate, TRL 6, based on NASA designs to support lunar rovers of similar or larger size (ref). ESA's Mars Fetch Rover also appears to feature them
Drive train, steering, suspension: High, TRL 6, see similar sized all electric high performance German kids racing league (ref)
Electric Winches: High, TRL 6, commonly used on Earth, in many sizes and force maximums
Stainless Steel Cables: High, TRL 6, has not been commonly used on the moon
Electric Lunar Battery Power: High, TRL 9
Li Batteries: High, TRL 6, EV batteries for Lunar operations is new
Solar Panels: High, TRL 9
Computer: High, TRL 8, RUAG's Constellation Single Board Computer (cSBC) for example
4g, wifi: High, TRL 6
Vibrating Knife: Low, TRL 3, conceptual needing testing, but not a critical technology and may be deleted.
Crane Components
Tripod: High, TRL 9 (small version used on Apollo 11)
Large Tripod Crane: Medium, TRL 6, is large for most Earth applications
The Integrated System: Low, TRL 3. This is new lunar optimized, lightweight system that would not be needed on Earth
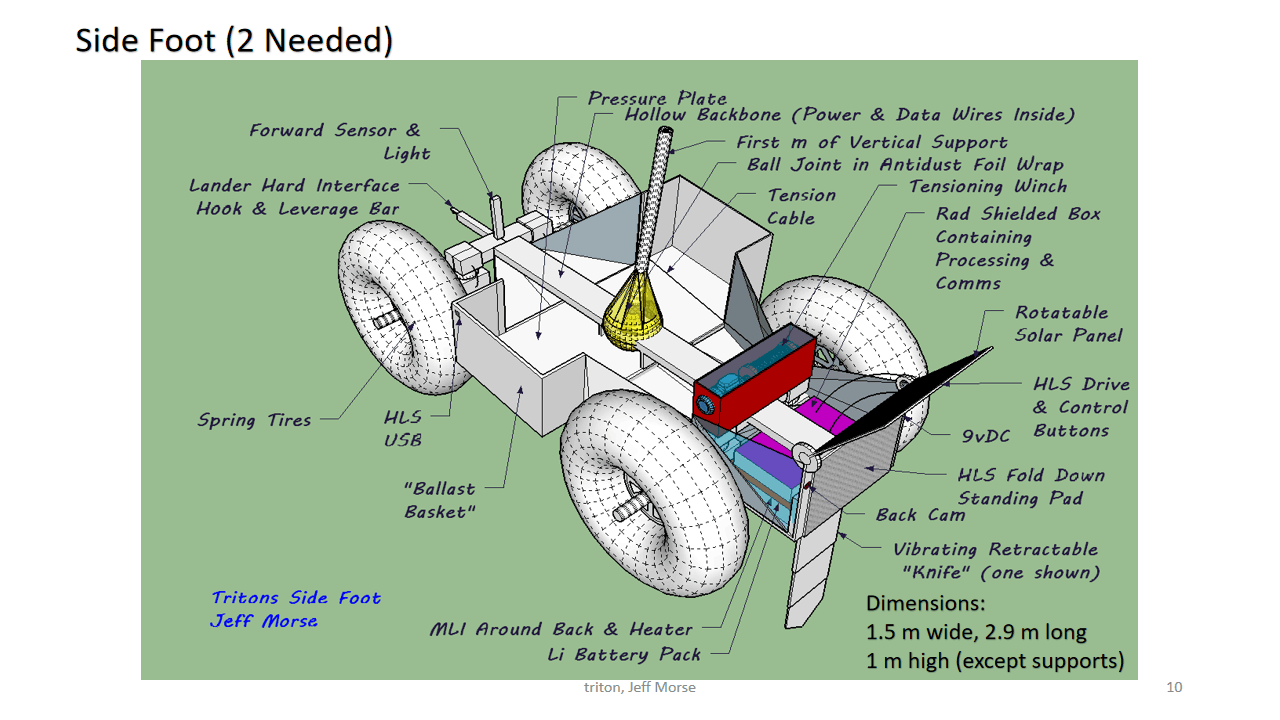
Image Description
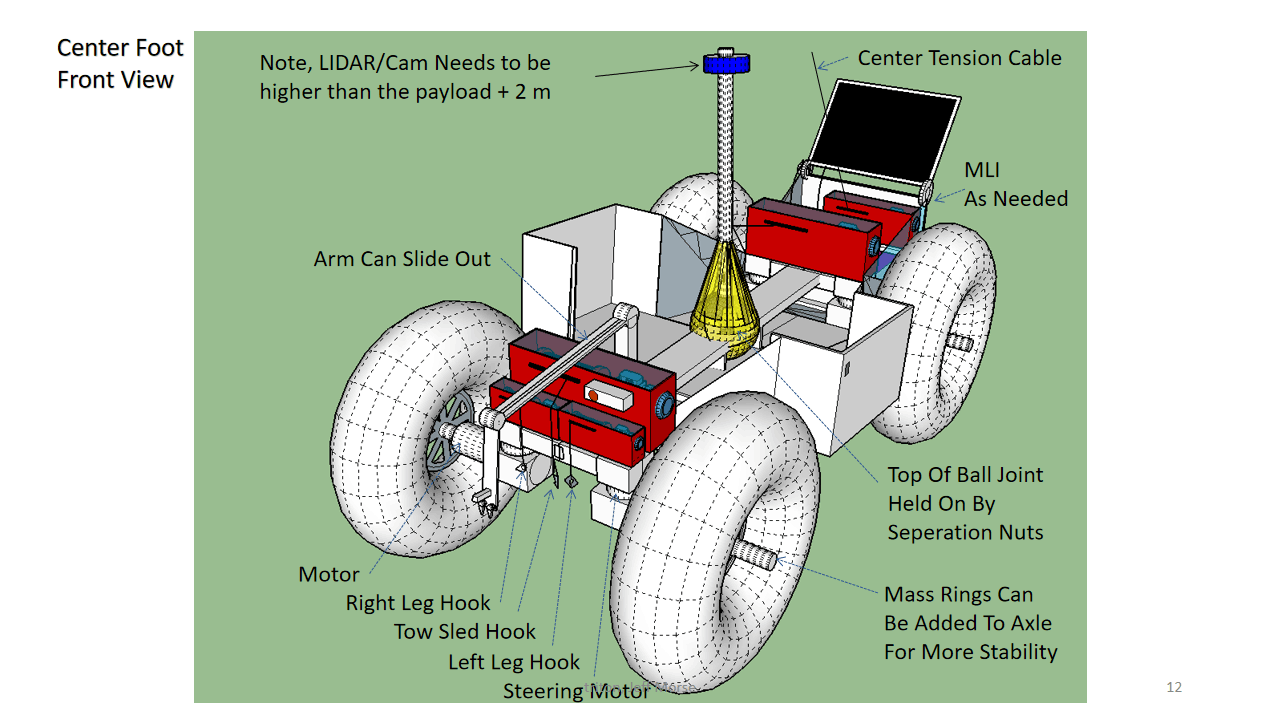
Image Description
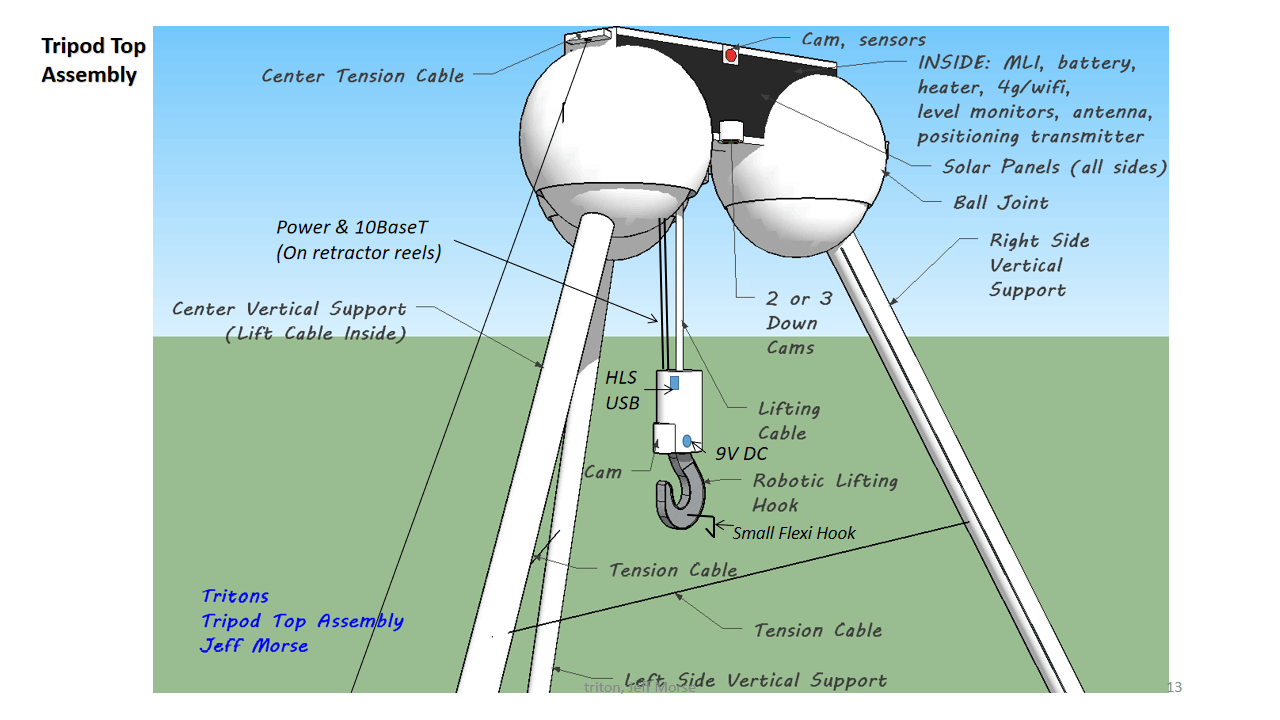
Image Description
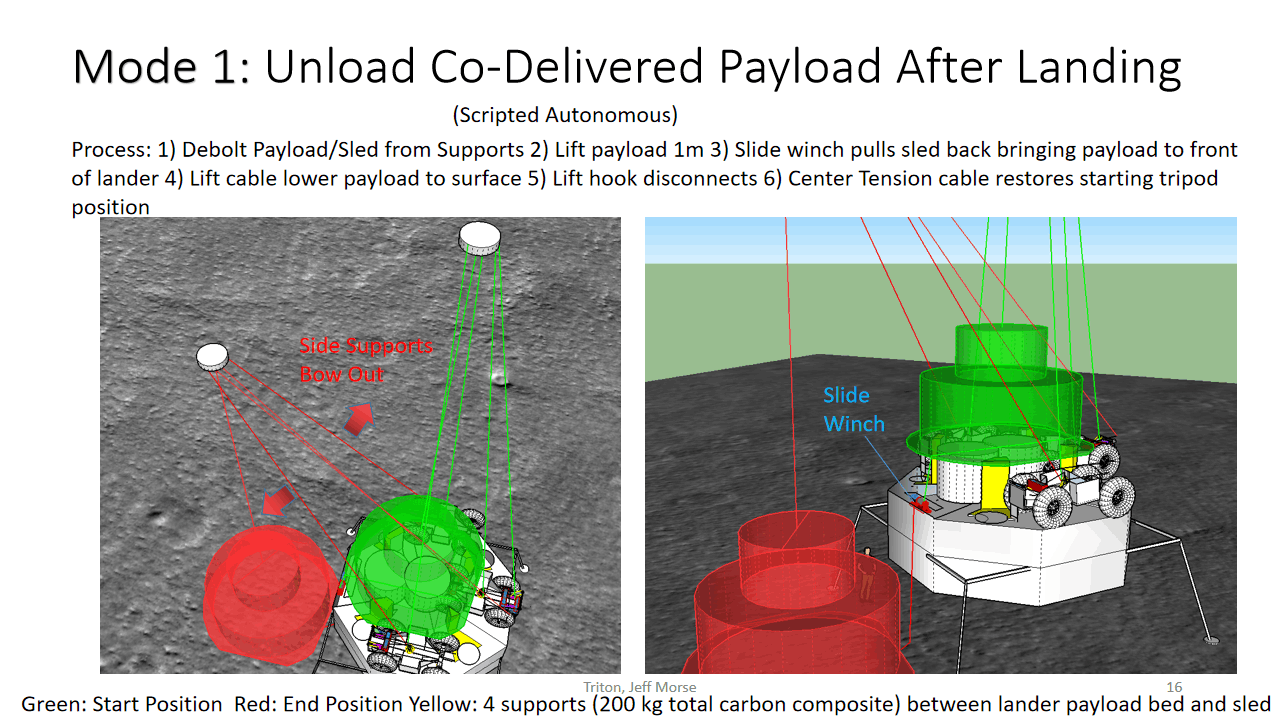
Image Description
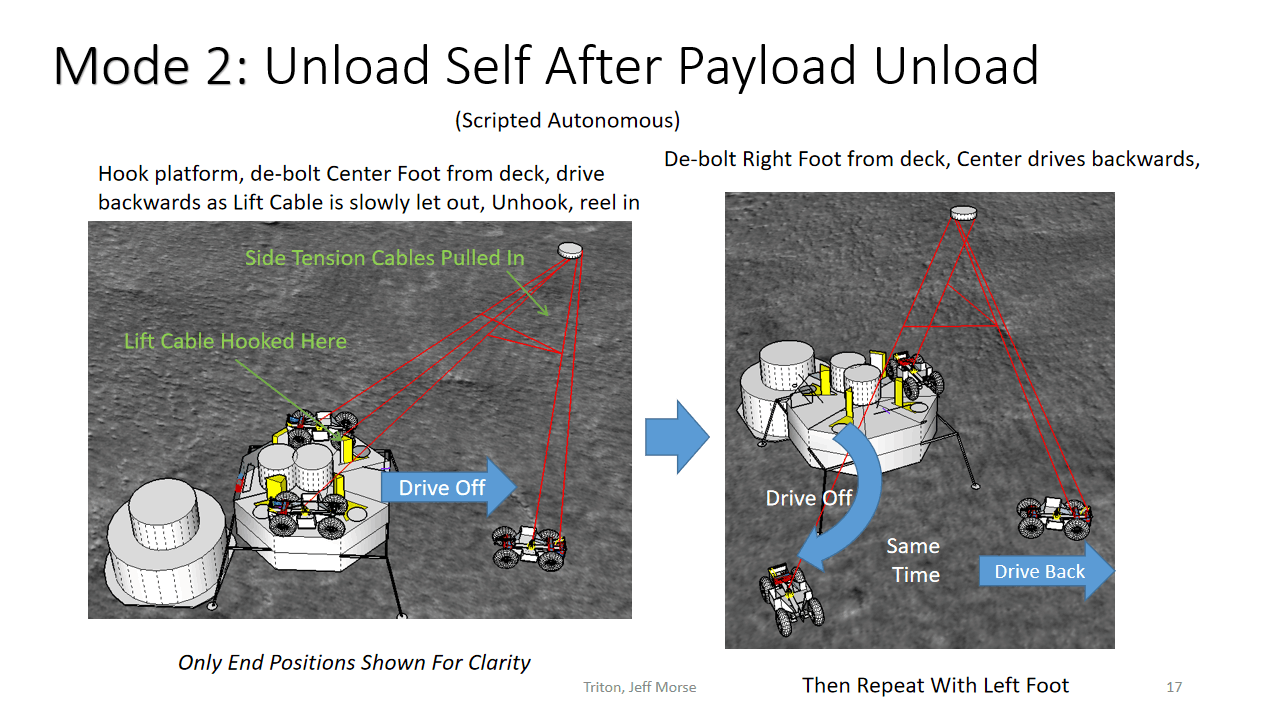
Image Description
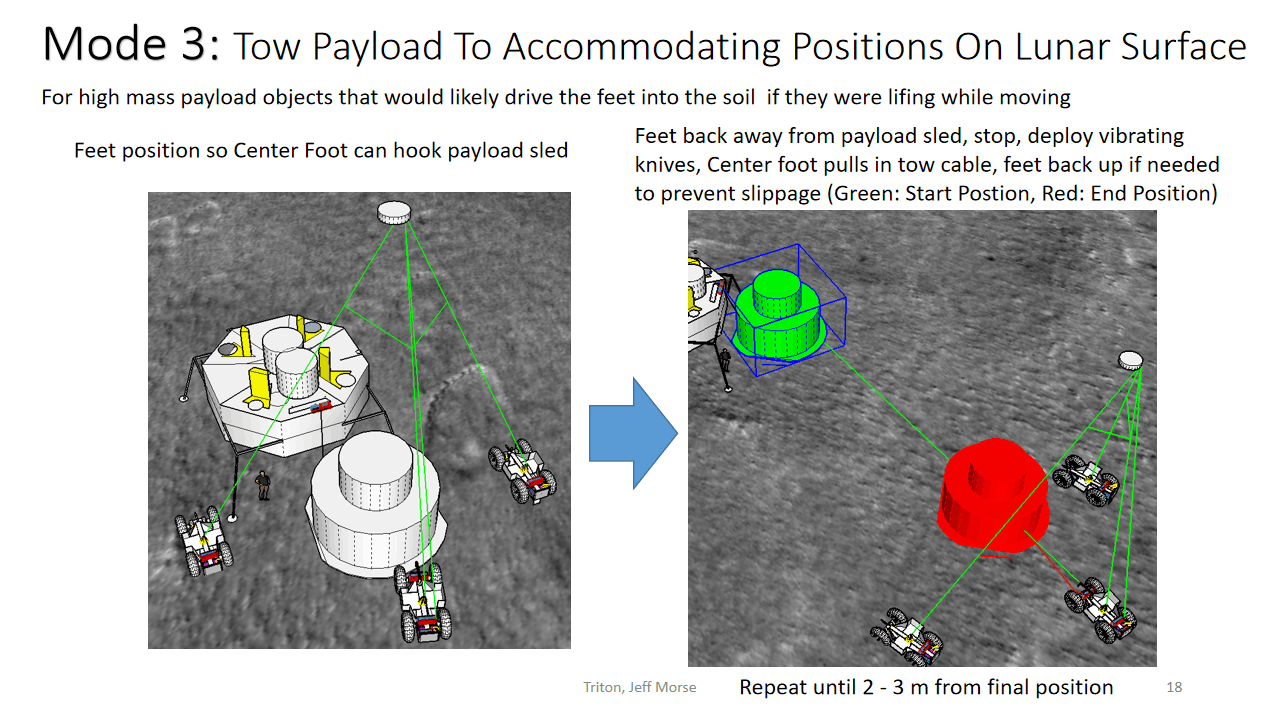
Image Description
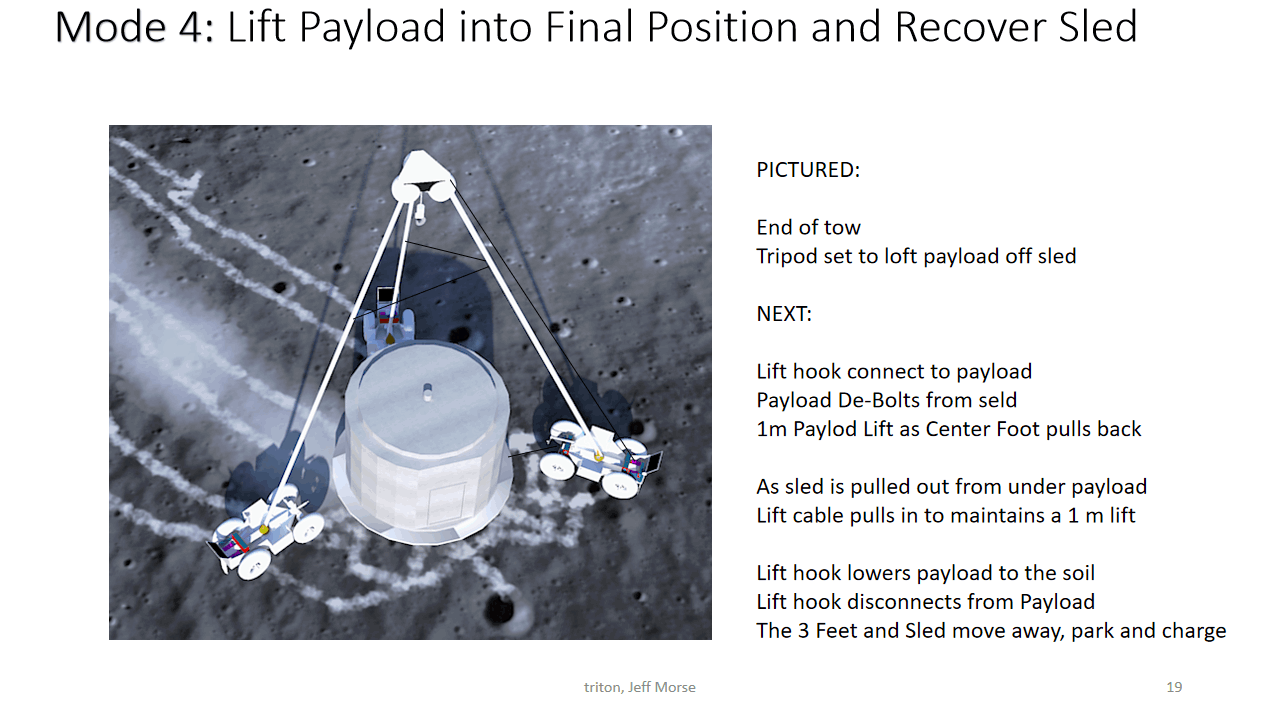
Image Description
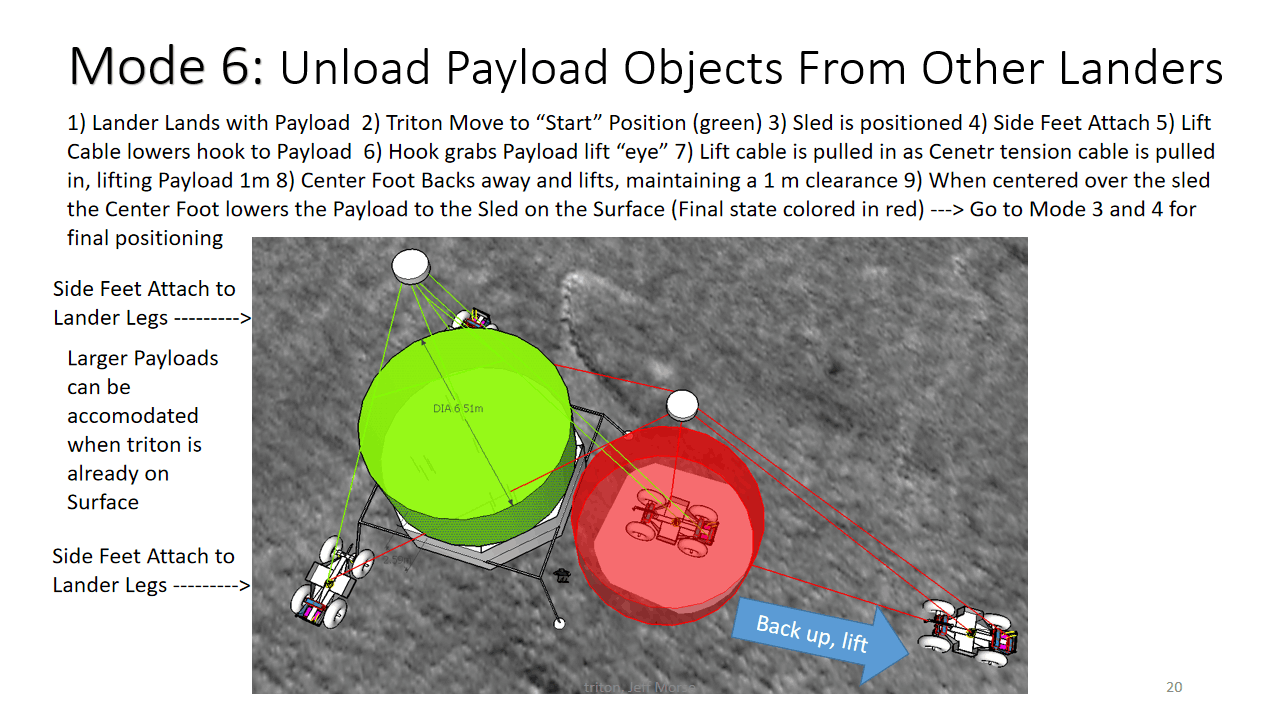
Image Description
Web page was created with Mobirise